|
Ashvin N Iyer I recently recieved my Bachelors from Purdue University, majoring Computer Science and minoring in Mathematics. I love anything computer science related, but I'm especially interested in Robotics and Artificial Intelligence. Most recently, I interned at Kodiak Robotics, working on simulation and motion planning for self-driving trucks (and will be returning for full-time in January 2025!) I have also spent time performing robotics research at both the IDEAS and CoRAL Labs, where I have explored both classical and learning-based methods for robotics. |

|
Experience |

|
Simulation / Motion Planning Software Engineer Intern -Kodiak RoboticsSeptember 2023 - December 2023 / May 2024 - August 2024 I worked with both simulation and motion planning teams to help improve the performance of our planning algorithms. Specifically, I enhanced simulator capabilities to support testing of the entire planning stack, automated large-scale evaluation of generated plans in simulations, and improved upon existing plans using sampling-based techniques. |

|
Embedded Software Engineer Intern -AmazonMay 2023 - August 2023 I worked on the bluetooth team in Lab126, where I helped enable simultaneous bluetooth device connections to single audio source and handle multi-client phone call logic (Using Hands-Free Protocol). |

|
Student Researcher -IDEAS Lab (Purdue)January 2024 - May 2024 I performed research under Dr. Aniket Bera, developing a classical controller for quadruped walking, specifically to enable the use of motion planning methods that output in cartesian space rather than joint space. |

|
Student Researcher -CoRAL Lab (Purdue)May 2022 - May 2023 I performed research under Dr. Ahmed H. Qureshi, where I developed methods for multi-agent exploration methods using Reinforcement Learning. This work resulted in a co-first author publication at IROS 2023. |
Publications |

|
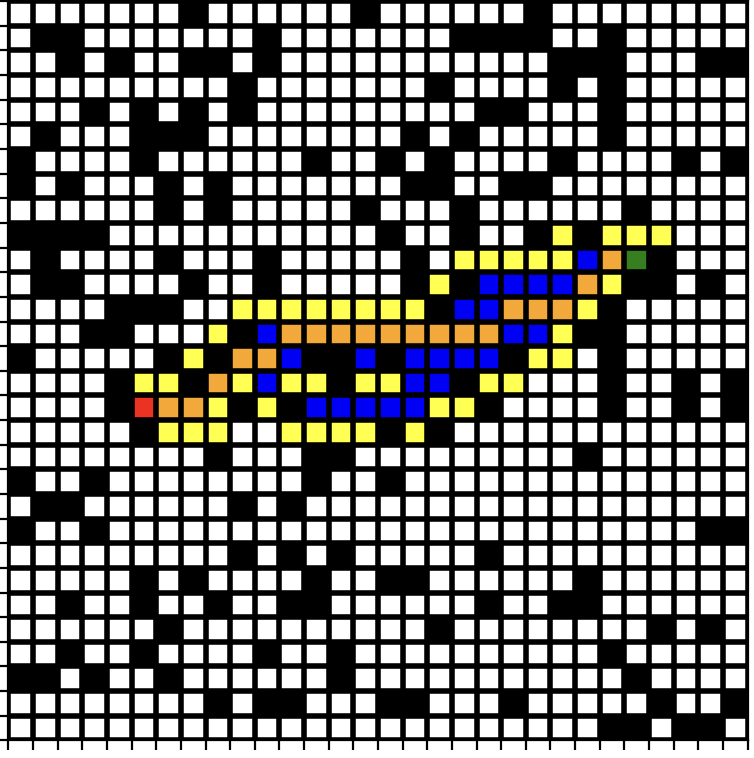
Efficient Q-Learning over Visit Frequency Maps for Multi-agent Exploration of Unknown EnvironmentsXuyang Chen*, Ashvin Iyer*, Zixing Wang and Ahmed H. Qureshi IEEE/RSJ IROS 2023 arXiv / Code / Video * Indicates Equal Contribution |
Projects / Competitions |
|
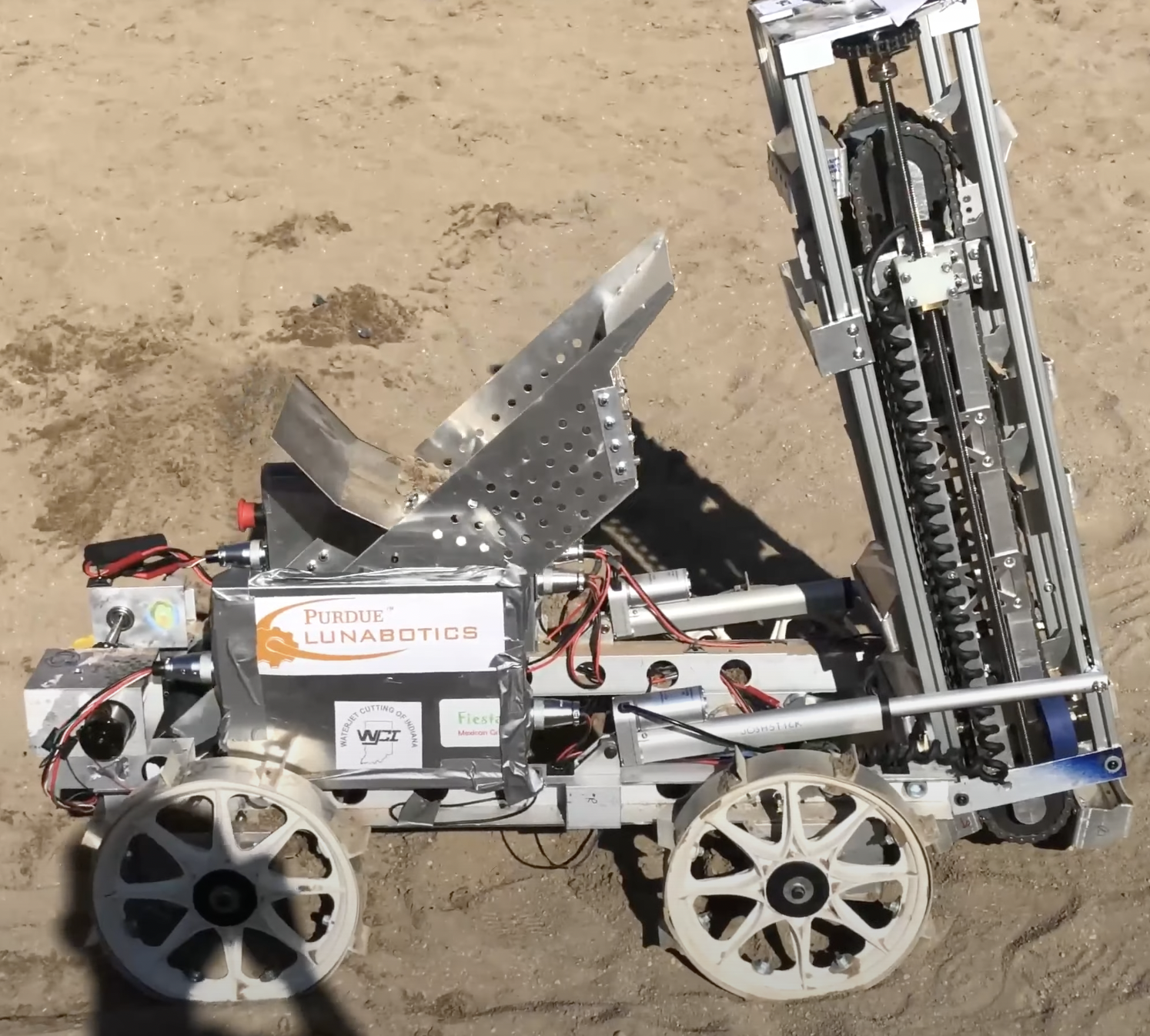
Purdue LunaboticsDuring my team on the team, I was the Software Lead, where I led a group of 15+ students to implement the following: 1. Utilizing SLAM to map out surrounding objects / obstacles 2. Performing dynamic motion planning (using D*) and robot control (using MPC) 3. Automating subsystems for picking up / depositing objects (using sensor feedback + PID) 4. Handling communication between processors and hardware motor / sensor drivers 5. Creating an entire behavior state machine to handle transitions between different tasks Our team competes in the NASA Lunabotics Competition yearly. In the 2023 season, we placed 6th overall and 3rd in autonomy among all competing teams. |

|
Combining Reinforcement Learning and Imitation LearningI worked on combining Reinforcement Learning and Imitation Learning policies for hand manipulation tasks. Specifically, I implemented and modified Waymo's BC-SAC paper. Modifications that improved results include using dynamic weighting between IL and RL policies and artificially boosting demonstrations with positive policy outputs. Thanks to Raghava Uppuluri for help on this project! |
|
Robotics AlgorithmsI keep a repository of robotics algorithms I implement from scratch, primarily to help improve my understanding (plus they're fun to program :)). I try to update this repository whenever I get spare time. |
|
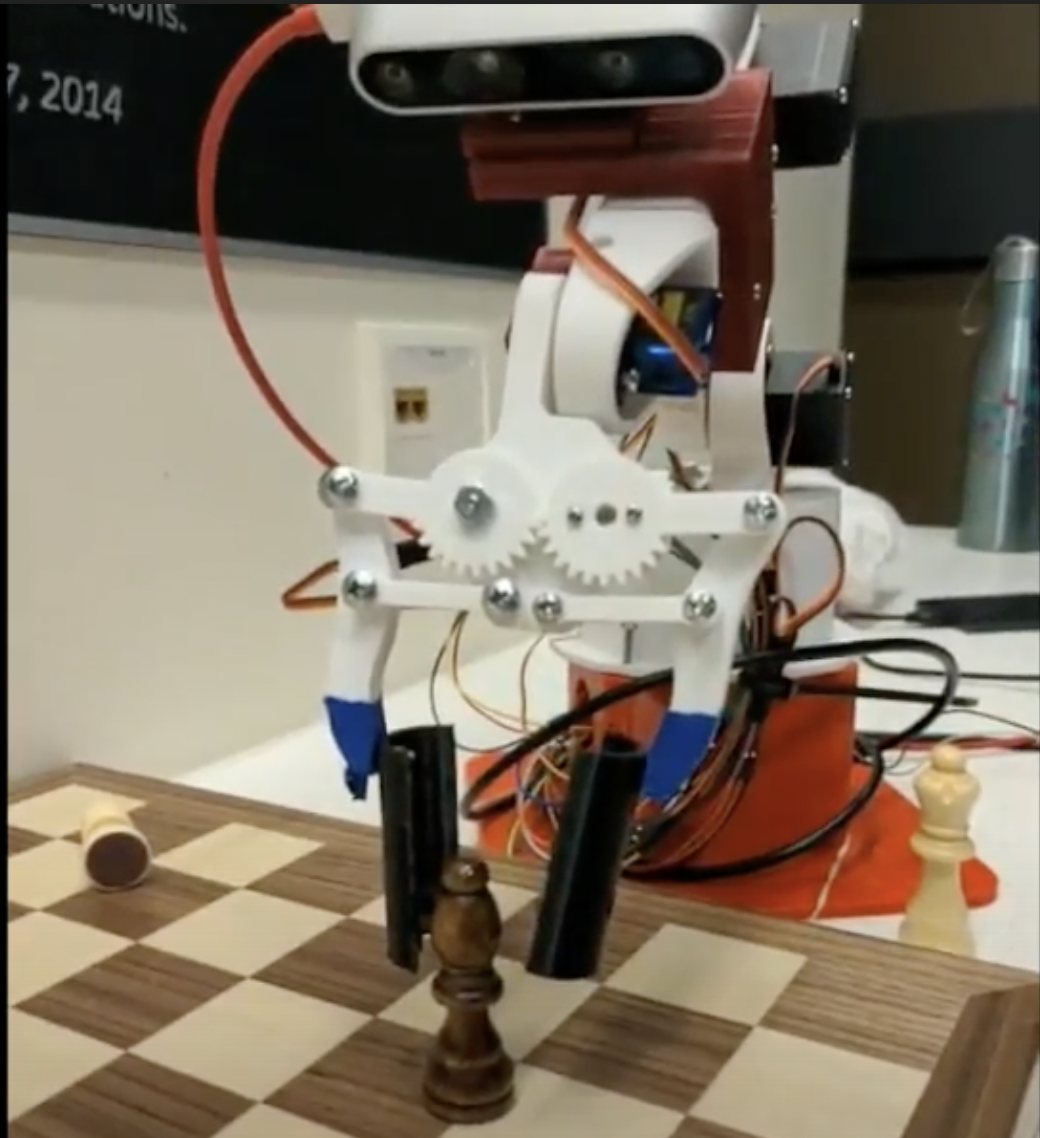
Autonomous Robotics ClubI joined the Autonomous Robotics Club at Purdue my freshmen year, giving me my first exposure to robotics in college. Here, I tried implementing inverse kinematics and visual servoing for a robotic arm to be able to pick and place chess pieces. |
|
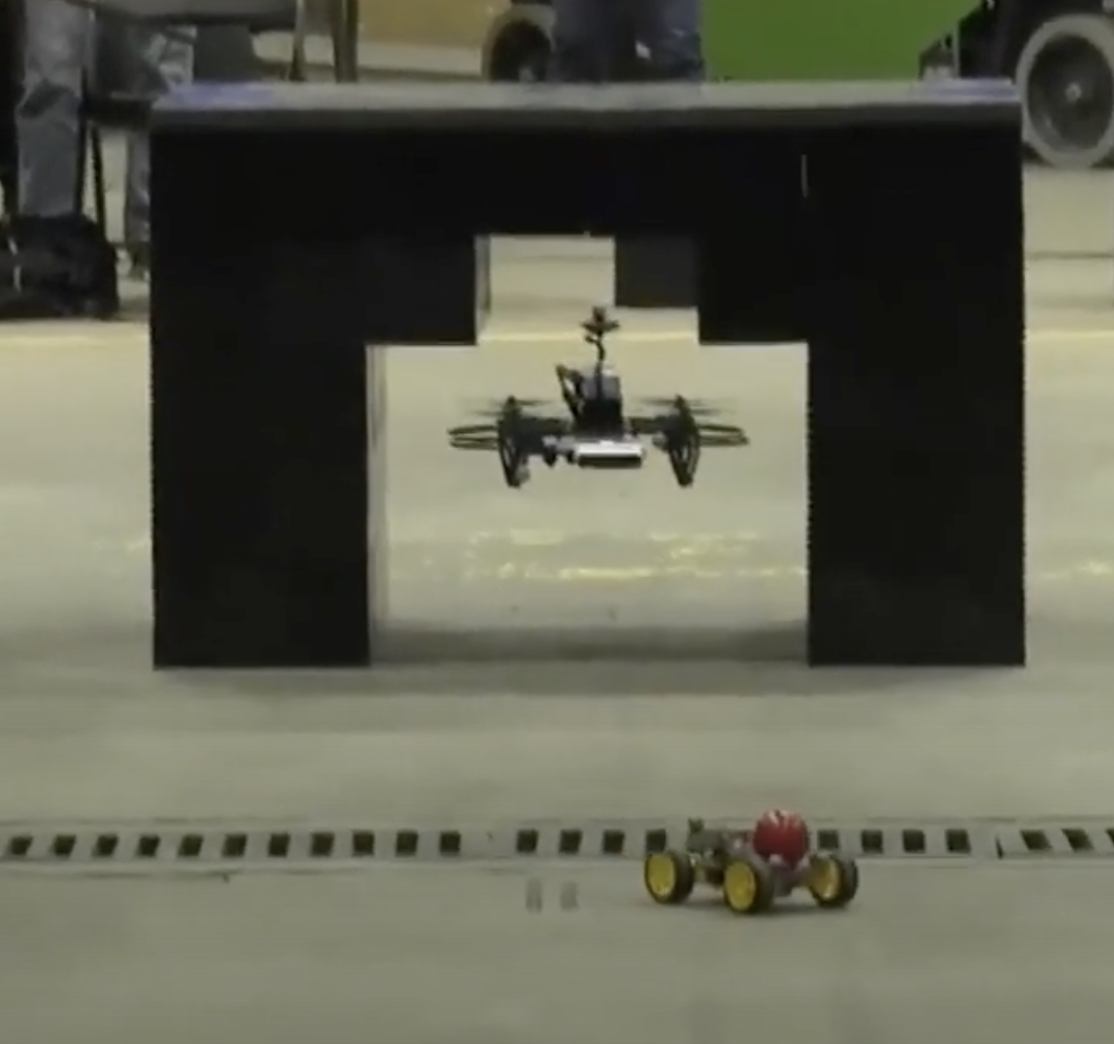
Drone VideoOn the Drone Video team, our task was to closely follow a ground rover with a drone equipped with a camera. Specifically, I helped improve the tracking by implementing a Kalman Filter on top of single-frame detections for prediction of the rover, which was used to guide the drone's path planning. While on the team, we participated in the Purdue Research Exposition in Fall 2022, where we placed 2nd in the College of Science. |
Education |

|
Purdue UniversityAugust 2021 - December 2024 Bachelors of Science in Computer Science Minor in Mathematics |
|
This website is based off John Barron's source code. |